A multi-armed robot for assisting with agricultural tasks - Robohub
Source: robohub
Published: 3/18/2026
To read the full content, please visit the original article.
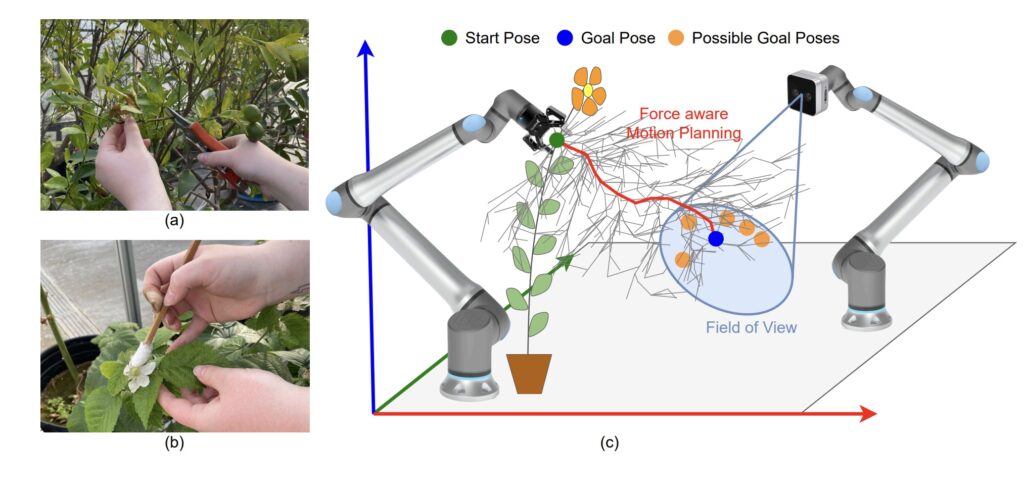
Read original articleThe article discusses a novel robotic approach developed by Madhav Rijal and colleagues to assist with agricultural tasks such as branch pruning and hand pollination. Their work addresses the challenge of accessing flowers or fruits that are occluded by plant branches, which are deformable, fragile, and constrained by their attachment to the plant. Unlike traditional pick-and-place tasks, manipulating branches requires careful force management to avoid damage. The core problem tackled is how a robot can safely manipulate branches to reveal hidden flowers while minimizing harm by being aware of interaction forces.
Their solution combines geometric modeling and real-time force feedback within a motion planning framework. Using an RRT*-based planner guided by a geometric heuristic, the robot generates feasible manipulation paths that respect branch constraints. During execution, force sensors monitor interaction forces; if forces exceed safe thresholds, the system replans the motion online to reduce stress on the branch. This adaptive approach ensures both reachability and safety. The key contributions include a heuristic model that requires no branch-specific tuning, a
Tags
robotroboticsagricultural-roboticsmulti-armed-robotforce-aware-manipulationprecision-pollinationrobotic-manipulation