China’s new humanoid robot framework enables breakdance and backflips
Source: interestingengineering
Author: @IntEngineering
Published: 3/10/2026
To read the full content, please visit the original article.
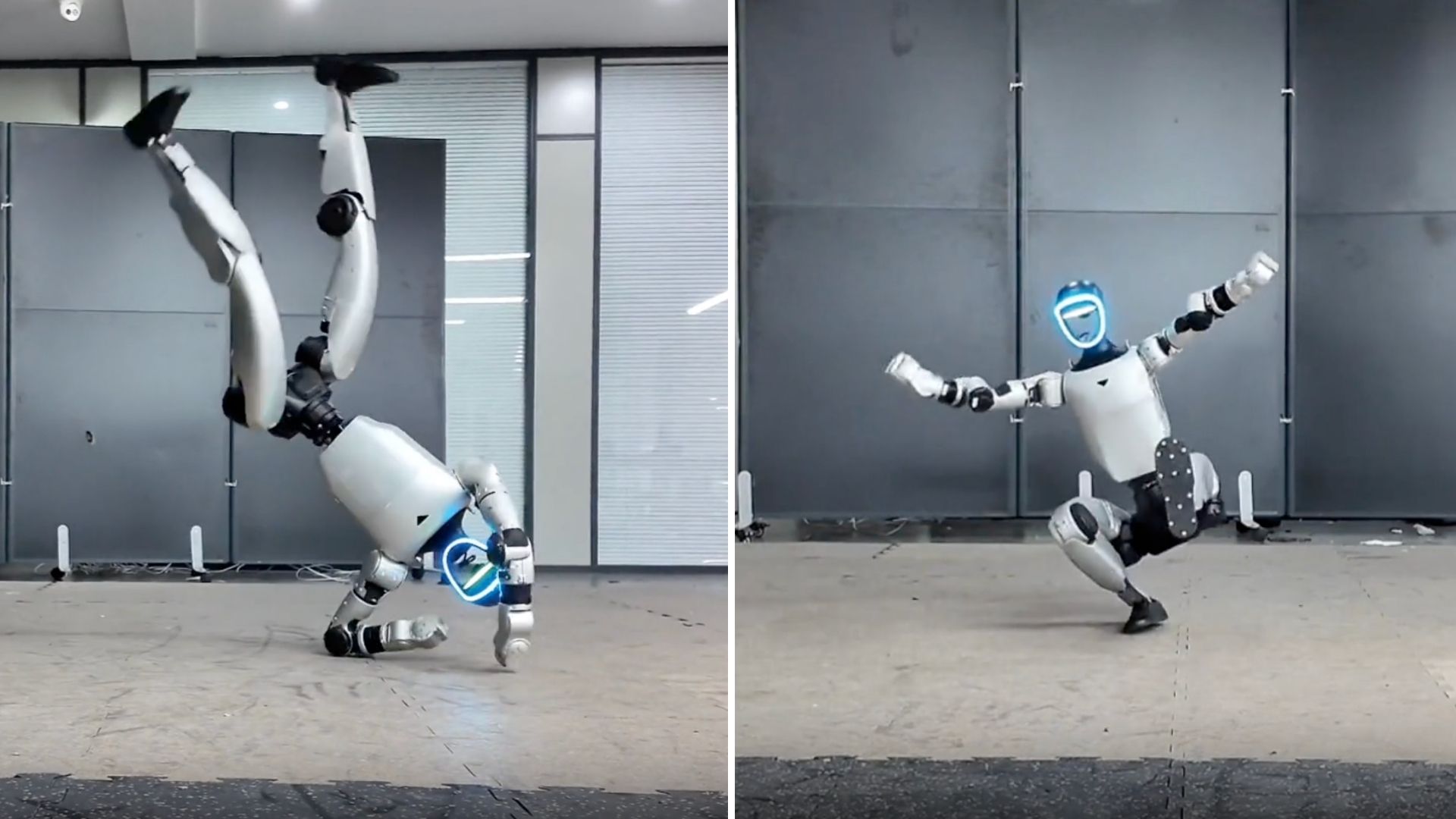
Read original articleChina’s Beijing Institute for General Artificial Intelligence (BIGAI) has developed a new humanoid robot motion framework called OmniXtreme that enables robots to perform a wide range of highly dynamic and athletic movements, such as backflips, breakdancing, martial arts kicks, and pistol squats. Unlike previous approaches that relied on overfitted tracking policies for individual motions, OmniXtreme uses a single unified algorithm to control multiple complex movements with over 90% success rates in real-world tests. This framework significantly improves training efficiency and motion coordination by employing a two-stage learning process.
The two-stage method begins with pre-training a base policy through DAgger-based Flow Matching to aggregate diverse motion data from multiple experts. In the second stage, the base policy is frozen while a residual policy is optimized under strict motor constraints and safety regularizations to bridge the gap between simulation and real-world performance. Experiments with a Unitree G1 humanoid demonstrated a variety of skills, including consecutive backflips,
Tags
robothumanoid-robotroboticsmotion-frameworkreinforcement-learningAI-roboticsrobot-control-algorithms