CoRL2025 – RobustDexGrasp: dexterous robot hand grasping of nearly any object - Robohub
Source: robohub
Published: 11/11/2025
To read the full content, please visit the original article.
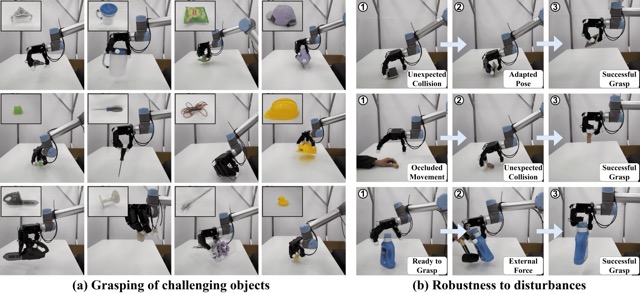
Read original articleThe article "CoRL2025 – RobustDexGrasp: dexterous robot hand grasping of nearly any object" discusses the significant challenges and advancements in enabling robotic hands to achieve human-like dexterity in grasping diverse objects. Human hands possess over 20 degrees of freedom, allowing them to perform complex and adaptive manipulations effortlessly. In contrast, most robots currently use simple grippers that lack this versatility, limiting their functionality in unstructured environments. The fundamental challenge lies in the high-dimensional control complexity of dexterous hands, the need to generalize grasping strategies across a wide variety of object shapes, and the difficulty of perceiving object geometry accurately using only monocular vision without detailed 3D models.
To overcome these obstacles, the authors introduce RobustDexGrasp, a novel framework designed to enable robust dexterous grasping. Their approach employs a teacher-student curriculum in reinforcement learning: a teacher policy trained in simulation with full object and tactile information guides a student policy that learns
Tags
roboticsdexterous-robot-handrobotic-graspingrobot-manipulationrobotic-control-systemsrobotic-perceptionrobotic-dexterity