Four-legged robot mimics canine gait using air-powered muscles
Source: interestingengineering
Author: @IntEngineering
Published: 12/15/2025
To read the full content, please visit the original article.
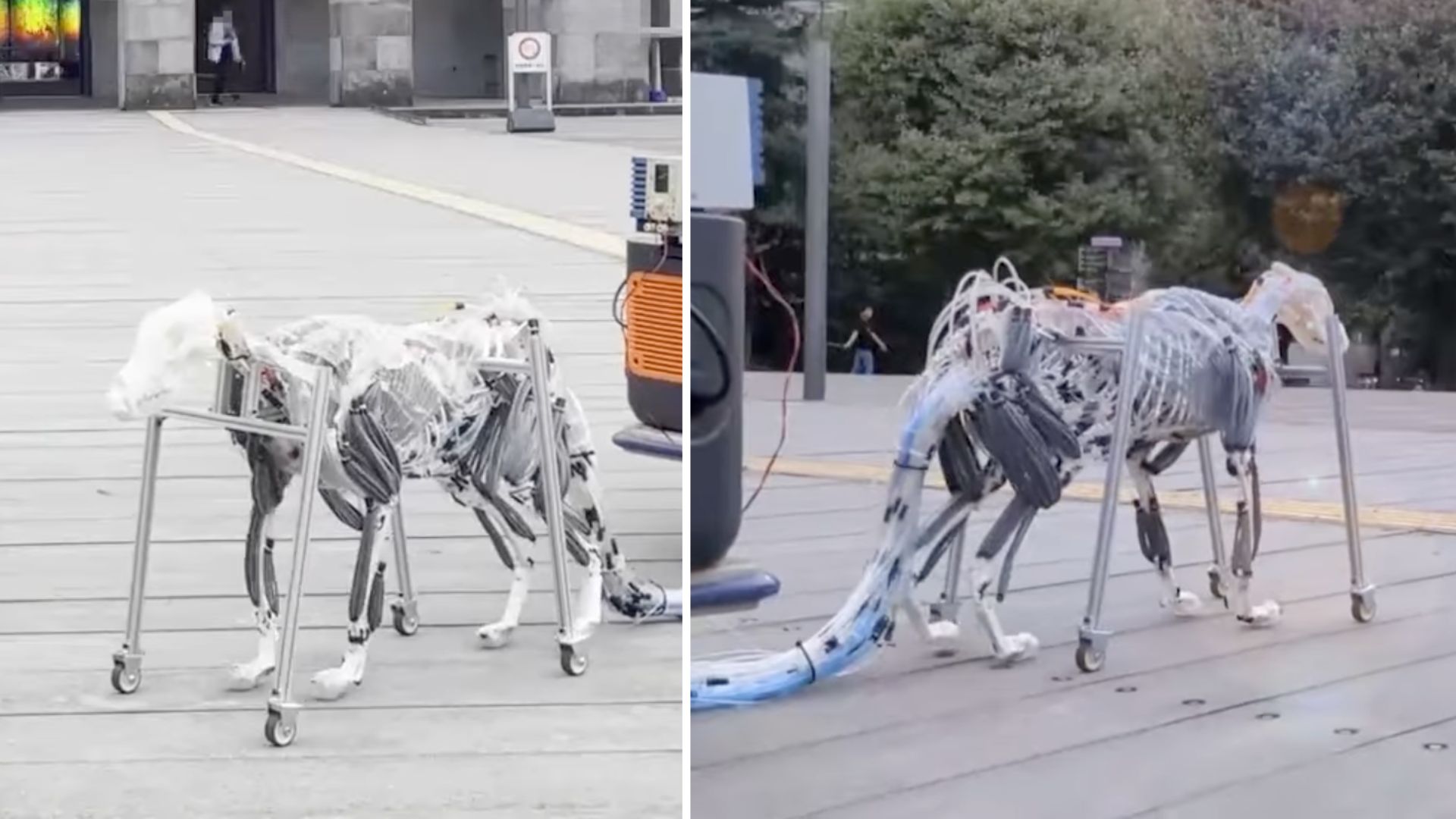
Read original articleEngineers at the Suzumori Endo Robotics Laboratory in Tokyo have developed a four-legged robot that mimics the smooth, natural gait of a dog using air-powered artificial muscles instead of traditional rigid motors. The robot’s lightweight, slightly flexible frame and pneumatic actuators—miniature braided tubes that expand or contract with air pressure—allow it to absorb impacts and shift weight gently, closely replicating canine locomotion. This biomimetic design focuses on reproducing the “hammock-like” muscle and tendon structure in dogs’ shoulders, which spreads forces during running and helps maintain stability over uneven terrain. Experiments showed that adjusting air pressure in the robot’s shoulder muscles influences stride length and reduces vibration by about 30% compared to rigid systems, highlighting how flexibility contributes to efficient, stable movement.
The robot’s construction uses accessible components, including 3D-printed plastic for the frame and commercial hinges for joints, keeping costs low while enabling rapid iteration. Sensors embedded in the artificial muscles provide feedback
Tags
roboticsbiomimeticspneumatic-actuatorsartificial-musclesfour-legged-robotsoft-roboticsrobotic-locomotion