New system boosts humanoid fall recovery by 81% on uneven ground
Source: interestingengineering
Author: @IntEngineering
Published: 2/19/2026
To read the full content, please visit the original article.
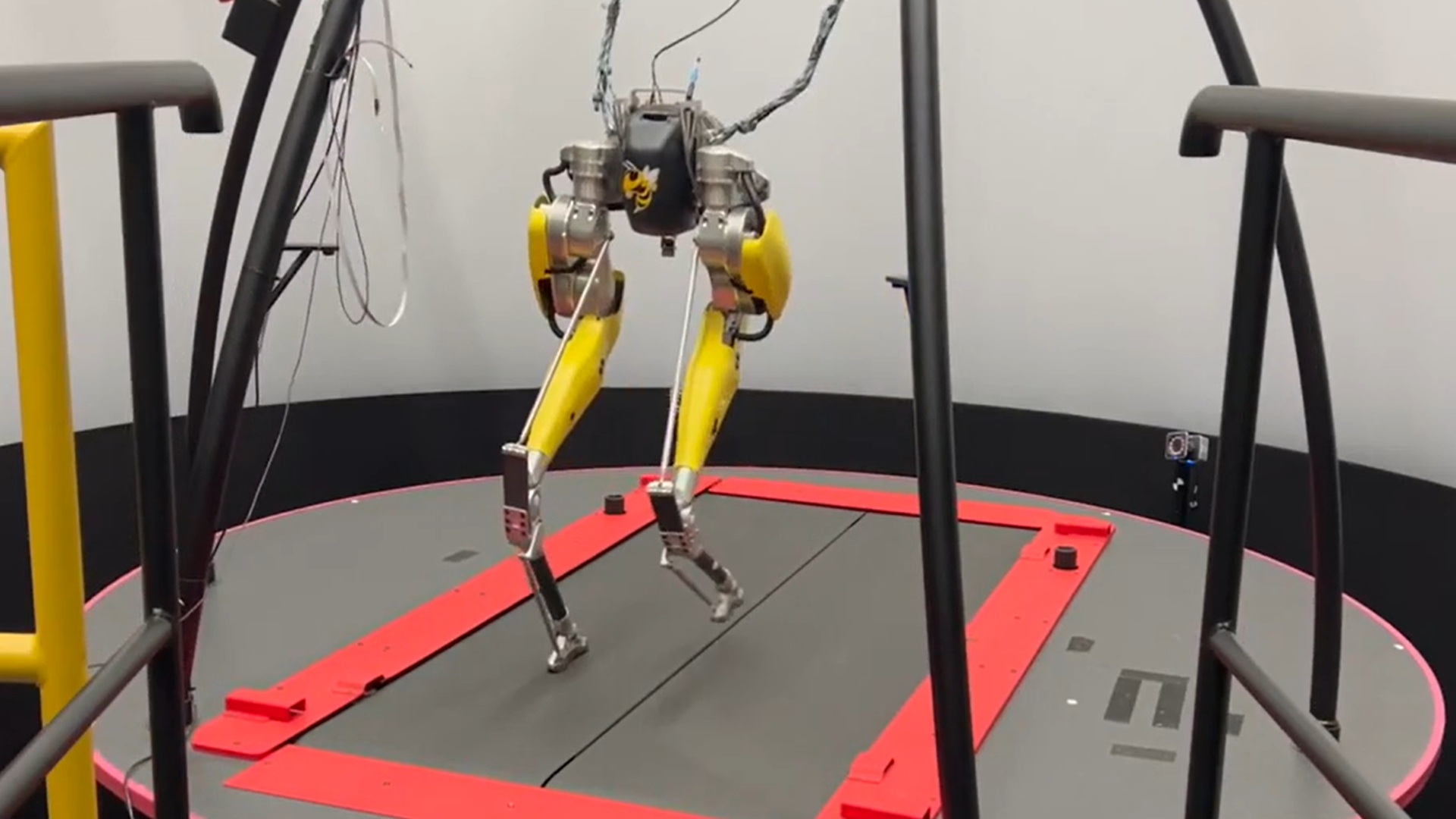
Read original articleResearchers at Georgia Tech have developed a real-time planning and control framework that significantly enhances humanoid robots' ability to recover from sudden disturbances while walking on uneven or moving terrain. Unlike previous approaches relying on fixed movement patterns, this system enables bipedal robots to continuously evaluate their stability and update their next steps in real time to prevent falls. Implemented on the Cassie robot and tested using a programmable treadmill and physical jolts, the framework improved Cassie’s recovery ability by 81%, enabling faster decision-making, better collision avoidance, and more confident stepping on dynamic surfaces.
The research addresses a critical challenge in robotics: recovering from unexpected directional shifts, such as standing on a moving vehicle or encountering obstacles mid-stride. Led by Ye Zhao and Ph.D. student Zhaoyuan Gu, the team combined formal logic rules with model predictive control to create a structured decision-making system that helps robots react reliably under stress. While the system showed impressive results, limitations remain, particularly when walking downhill or performing complex
Tags
roboticshumanoid-robotsbipedal-robotsrobot-fall-recoveryreal-time-controlautonomous-robotsrobot-stability