Reversible, detachable robotic hand redefines dexterity - Robohub
Source: robohub
Published: 2/19/2026
To read the full content, please visit the original article.
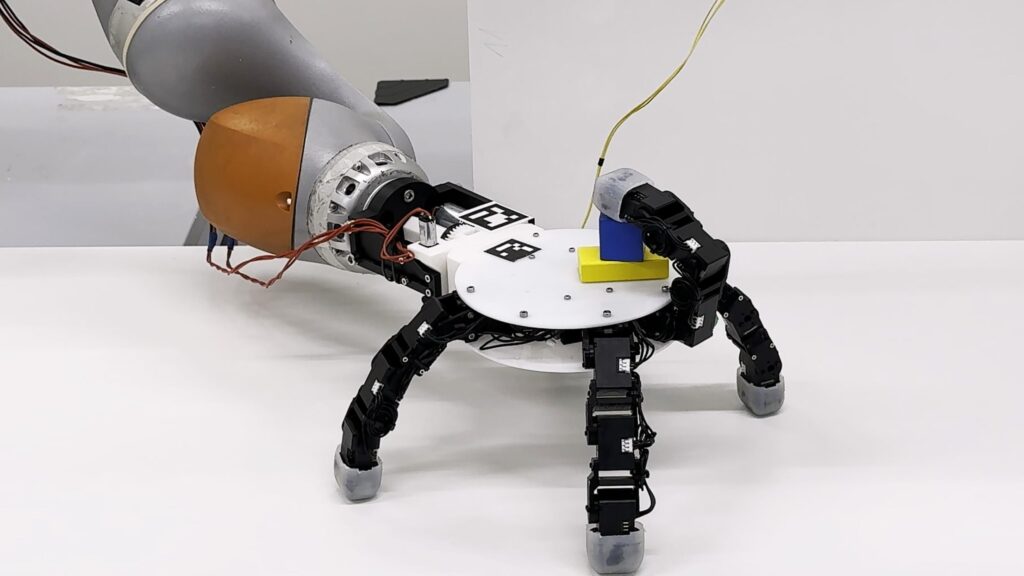
Read original articleA team of researchers at EPFL, led by Aude Billard, has developed a novel robotic hand that redefines dexterity by overcoming key limitations of the human hand. Unlike the asymmetrical human thumb and limited arm mobility, this robotic hand features a reversible design with up to six identical silicone-tipped fingers that can form opposing pairs in a thumb-like pinch. Its palm and back are interchangeable, and it can detach from its robotic arm to crawl like a spider, enabling it to grasp and carry objects beyond the arm’s reach. This capability, termed “loco manipulation,” combines stationary manipulation with autonomous mobility, offering promising applications in industrial, service, and exploratory robotics.
Inspired by nature’s versatile limbs, such as those of octopuses and praying mantises, the robotic hand can hold multiple objects simultaneously on its palm, back, or both. With five fingers, it replicates most traditional human grasps, and with more fingers, it can perform complex tasks typically requiring two hands, like
Tags
roboticsrobotic-handdexterityautonomous-mobilityloco-manipulationsilicone-tipped-fingersrobotic-design