Teaching robots to map large environments - Robohub
Source: robohub
Published: 11/5/2025
To read the full content, please visit the original article.
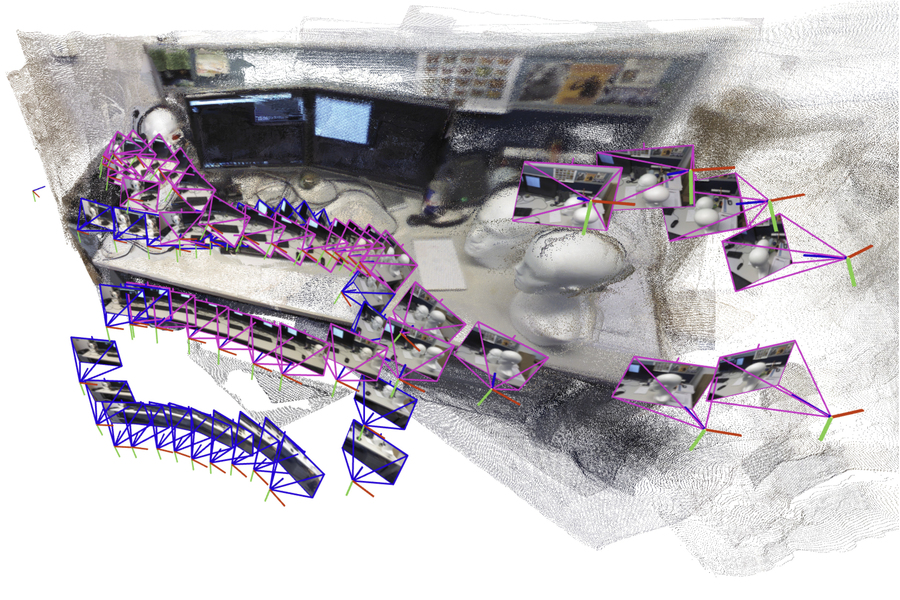
Read original articleThe article discusses a new AI-driven system developed by MIT researchers to enable robots to efficiently map large and complex environments in real-time. Traditional machine-learning models for simultaneous localization and mapping (SLAM) are limited by their capacity to process only a small number of images at once, which restricts their usefulness in time-sensitive scenarios like search-and-rescue missions. To address this, the MIT team created a method that incrementally generates smaller submaps from onboard camera images and then stitches these submaps together to form a complete 3D reconstruction of the environment. This approach allows the system to handle thousands of images quickly and estimate the robot’s position simultaneously, without requiring calibrated cameras or expert tuning.
The system’s simplicity, speed, and accuracy make it well-suited for real-world applications beyond disaster response, including extended reality devices and industrial robotics. By enabling rapid and scalable 3D mapping, the technology helps robots navigate complex spaces more effectively while maintaining ease of implementation. The research, led by graduate student
Tags
roboticsartificial-intelligence3D-mappingSLAMmachine-learningsearch-and-rescue-robotsautonomous-navigation