US: Robot dog balances rolling load on back with tactile sensing tech
Source: interestingengineering
Author: @IntEngineering
Published: 11/25/2025
To read the full content, please visit the original article.
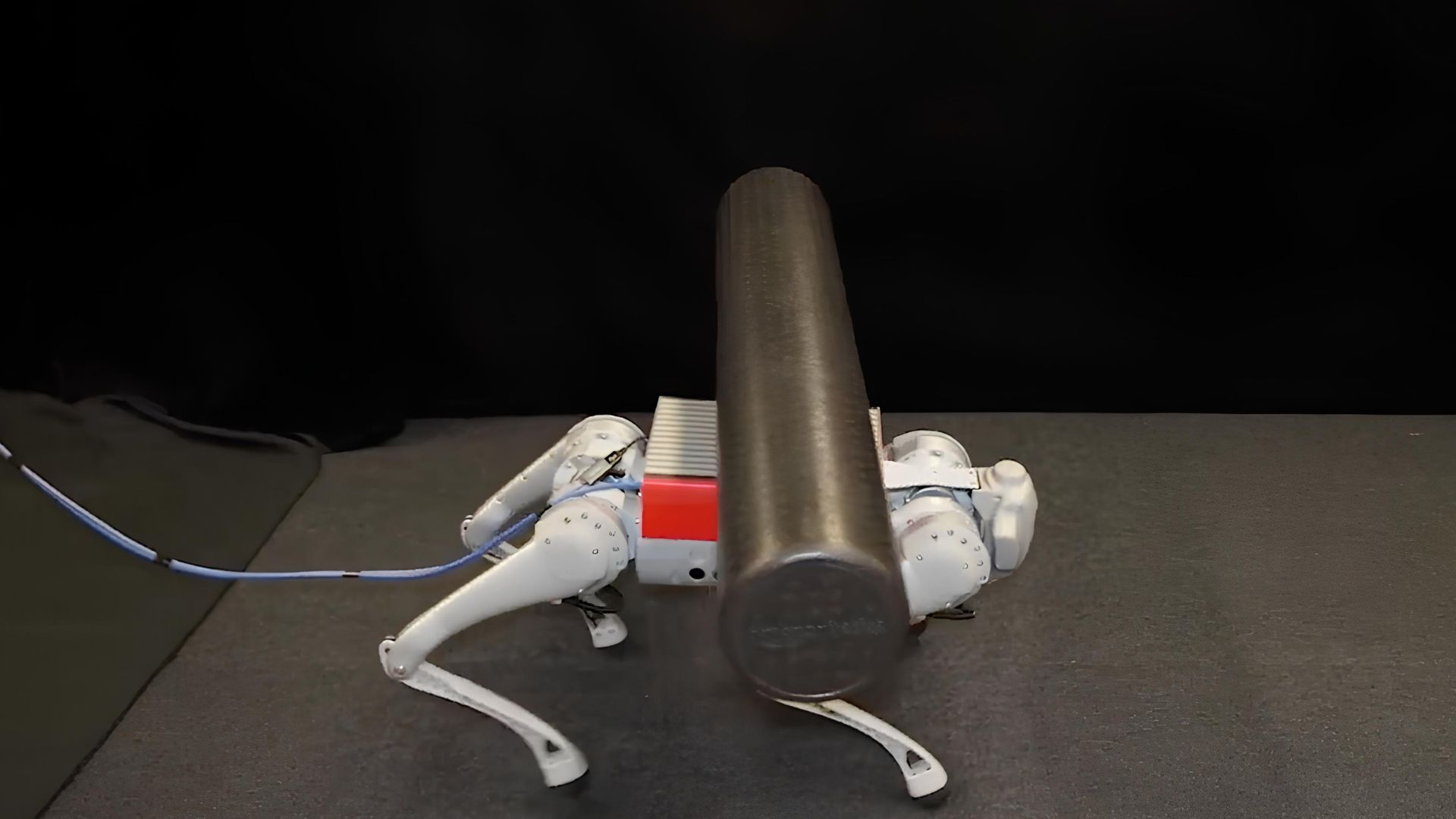
Read original articleResearchers at Carnegie Mellon University have developed LocoTouch, a novel tactile sensing system that enables quadrupedal robots to carry loose, unsecured cylindrical and irregularly shaped objects on their backs without the items rolling off during movement. Unlike traditional robots that rely on rigid containers or mounted boxes to secure cargo, LocoTouch uses a high-density tactile sensor array made from piezoresistive film and conductive electrodes spread flat across the robot’s back. This sensor continuously detects shifts in the load’s position and orientation, allowing the robot to adjust its posture and gait in real time to maintain balance, similar to how humans instinctively stabilize objects while walking.
The system was trained through reinforcement learning using over 4,000 digital twins in simulation, enabling the robot to experience a wide variety of object movements and disturbances. The learned balancing skills transferred directly to a physical Unitree Go1 quadruped robot, which successfully carried various objects over 60 meters, navigating obstacles and remaining stable even when bumped. This represents the
Tags
robottactile-sensingquadrupedal-robotsreinforcement-learningrobotic-balancepiezoresistive-sensorsrobotic-assistants