Robot nhiều cánh tay hỗ trợ công việc nông nghiệp - Robohub
Nguồn: robohub
Ngày đăng: 18/3/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
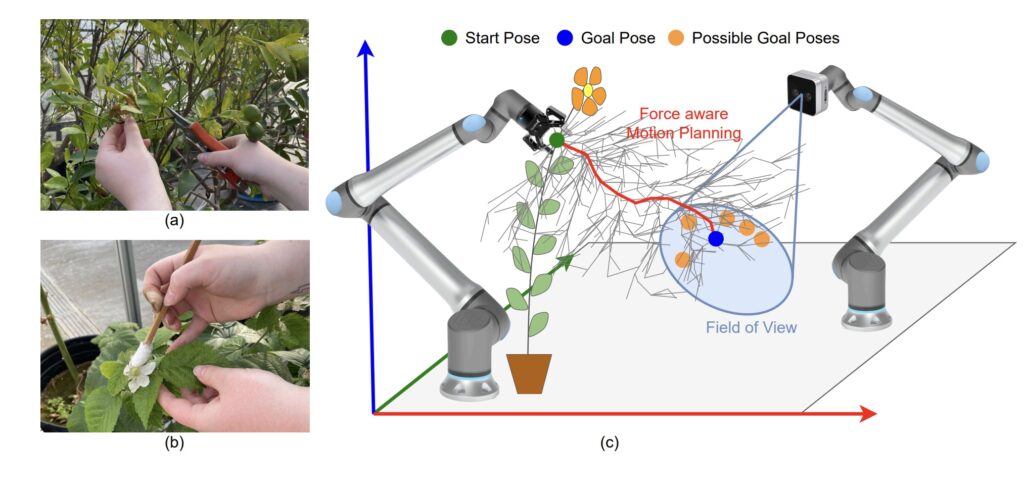
Đọc bài viết gốcBài báo thảo luận về một phương pháp robot mới do Madhav Rijal và các cộng sự phát triển nhằm hỗ trợ các công việc nông nghiệp như cắt tỉa cành và thụ phấn thủ công. Công trình của họ giải quyết thách thức tiếp cận các hoa hoặc quả bị che khuất bởi các cành cây, vốn có tính chất biến dạng, dễ gãy và bị giới hạn bởi sự gắn kết với cây. Khác với các nhiệm vụ lấy và đặt truyền thống, việc thao tác với cành cây đòi hỏi quản lý lực cẩn thận để tránh gây hư hại. Vấn đề cốt lõi được giải quyết là làm thế nào để robot có thể thao tác an toàn với cành cây nhằm lộ ra các hoa bị che khuất trong khi giảm thiểu tổn thương bằng cách nhận biết lực tương tác.
Giải pháp của họ kết hợp mô hình hình học và phản hồi lực thời gian thực trong một khung lập kế hoạch chuyển động. Sử dụng bộ lập kế hoạch dựa trên RRT* được hướng dẫn bởi một thủ thuật hình học, robot tạo ra các đường đi thao tác khả thi tuân thủ các giới hạn của cành cây. Trong quá trình thực hiện, cảm biến lực giám sát các lực tương tác; nếu lực vượt quá ngưỡng an toàn, hệ thống sẽ lập kế hoạch lại chuyển động trực tuyến để giảm áp lực lên cành. Phương pháp thích ứng này đảm bảo cả khả năng tiếp cận và an toàn. Những đóng góp chính bao gồm một mô hình thủ thuật không cần điều chỉnh riêng cho từng cành, một...
Thẻ
robotroboticsagricultural-roboticsmulti-armed-robotforce-aware-manipulationprecision-pollinationrobotic-manipulation