Khung robot người mới của Trung Quốc cho phép nhảy breakdance và nhào lộn sau
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 10/3/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
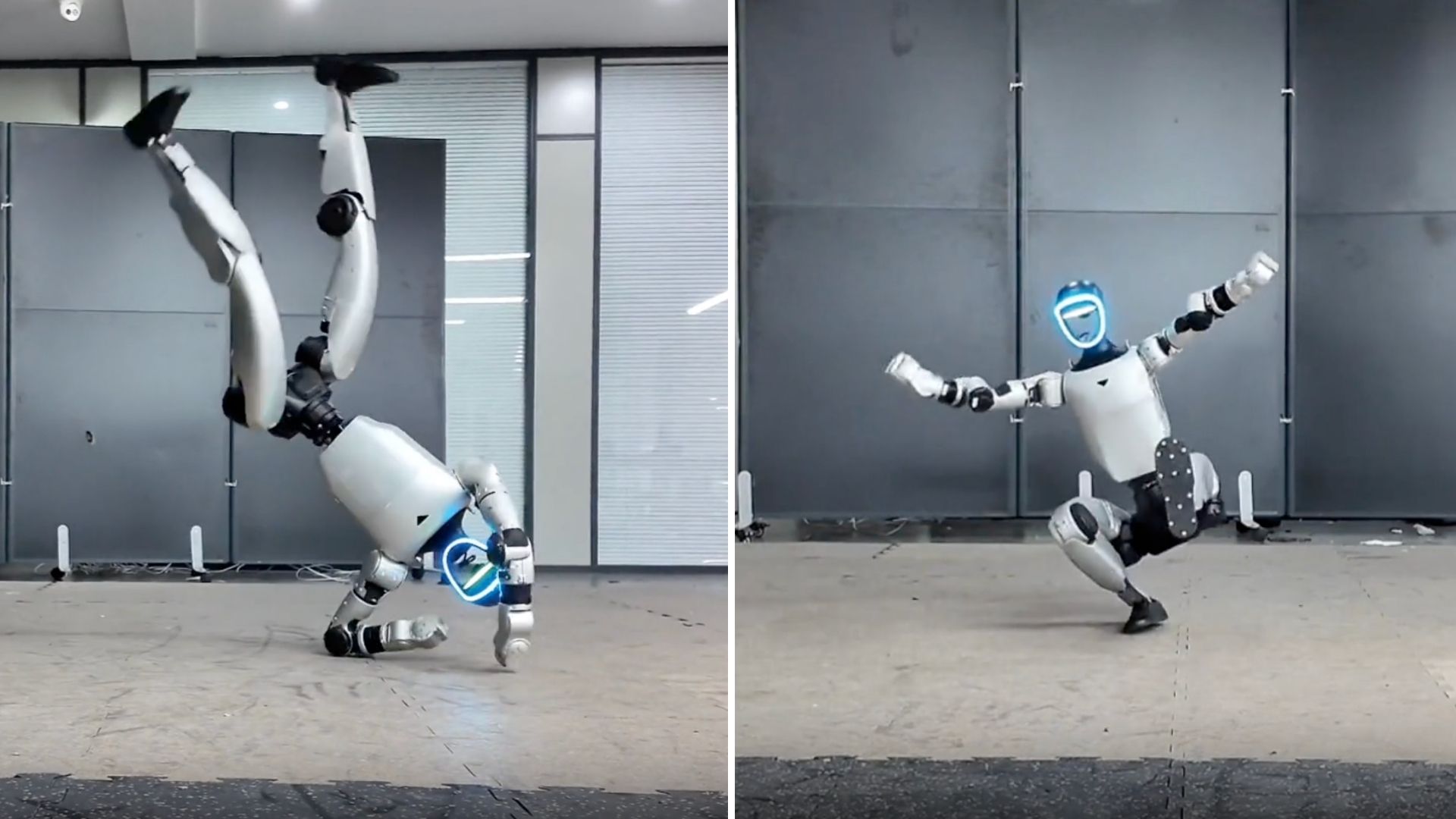
Đọc bài viết gốcViện Trí tuệ Nhân tạo Tổng quát Bắc Kinh (BIGAI) của Trung Quốc đã phát triển một khung chuyển động robot hình người mới mang tên OmniXtreme, cho phép robot thực hiện nhiều động tác năng động và thể thao đa dạng, như nhào lộn ngược, nhảy breakdance, đá võ thuật và ngồi xổm kiểu súng lục. Khác với các phương pháp trước đây dựa vào các chính sách theo dõi quá khớp cho từng động tác riêng lẻ, OmniXtreme sử dụng một thuật toán thống nhất duy nhất để điều khiển nhiều chuyển động phức tạp với tỷ lệ thành công trên 90% trong các thử nghiệm thực tế. Khung này cải thiện đáng kể hiệu quả đào tạo và sự phối hợp chuyển động bằng cách áp dụng quy trình học hai giai đoạn.
Phương pháp hai giai đoạn bắt đầu bằng việc tiền huấn luyện một chính sách cơ bản thông qua DAgger dựa trên Flow Matching để tổng hợp dữ liệu chuyển động đa dạng từ nhiều chuyên gia. Ở giai đoạn thứ hai, chính sách cơ bản được giữ cố định trong khi một chính sách dư được tối ưu hóa dưới các giới hạn nghiêm ngặt về động cơ và các quy định an toàn nhằm thu hẹp khoảng cách giữa mô phỏng và hiệu suất thực tế. Các thí nghiệm với robot hình người Unitree G1 đã thể hiện nhiều kỹ năng khác nhau, bao gồm các pha nhào lộn liên tiếp,
Thẻ
robothumanoid-robotroboticsmotion-frameworkreinforcement-learningAI-roboticsrobot-control-algorithms