CoRL2025 – RobustDexGrasp: bàn tay robot khéo léo nắm bắt gần như bất kỳ vật thể nào - Robohub
Nguồn: robohub
Ngày đăng: 11/11/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
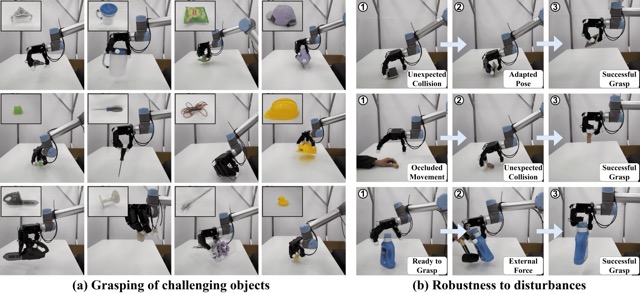
Đọc bài viết gốcBài báo "CoRL2025 – RobustDexGrasp: bàn tay robot khéo léo nắm bắt gần như bất kỳ vật thể nào" thảo luận về những thách thức lớn và tiến bộ trong việc giúp bàn tay robot đạt được sự khéo léo giống như con người trong việc nắm bắt các vật thể đa dạng. Bàn tay con người có hơn 20 bậc tự do, cho phép thực hiện các thao tác phức tạp và thích ứng một cách dễ dàng. Ngược lại, hầu hết các robot hiện nay sử dụng các kẹp đơn giản thiếu tính đa năng này, làm hạn chế chức năng của chúng trong các môi trường không có cấu trúc rõ ràng. Thách thức cơ bản nằm ở sự phức tạp trong điều khiển đa chiều của bàn tay khéo léo, nhu cầu tổng quát hóa các chiến lược nắm bắt trên nhiều hình dạng vật thể khác nhau, và khó khăn trong việc nhận biết chính xác hình học của vật thể chỉ bằng thị giác đơn sắc mà không cần các mô hình 3D chi tiết.
Để vượt qua những trở ngại này, các tác giả giới thiệu RobustDexGrasp, một khung làm việc mới được thiết kế để cho phép việc nắm bắt khéo léo một cách bền vững. Phương pháp của họ sử dụng chương trình giảng dạy thầy-trò trong học tăng cường: một chính sách thầy được đào tạo trong mô phỏng với đầy đủ thông tin về vật thể và xúc giác hướng dẫn một chính sách trò học tập.
Thẻ
roboticsdexterous-robot-handrobotic-graspingrobot-manipulationrobotic-control-systemsrobotic-perceptionrobotic-dexterity