Cảm biến dựa trên graphene để cải thiện cảm giác chạm của robot - Robohub
Nguồn: robohub
Ngày đăng: 16/3/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
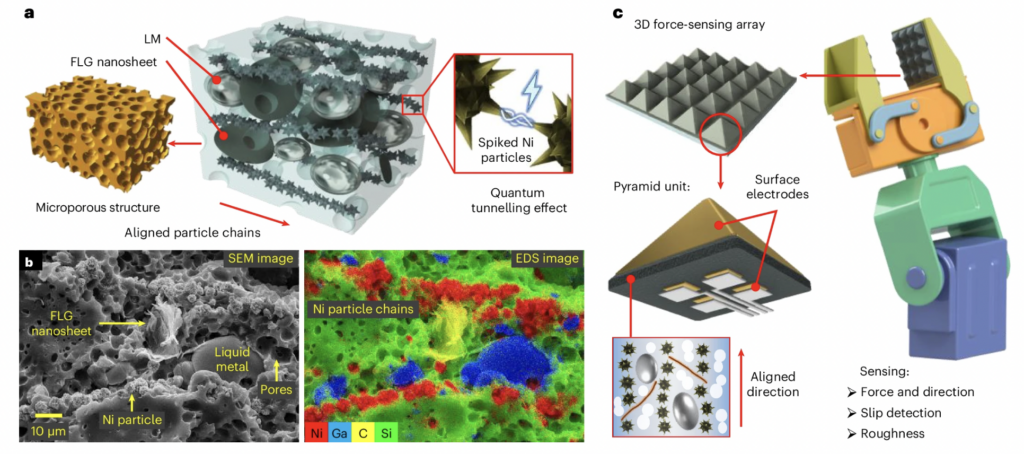
Đọc bài viết gốcCác nhà nghiên cứu tại Đại học Cambridge đã phát triển một cảm biến xúc giác siêu nhỏ, nâng cao đáng kể khả năng cảm nhận của robot, đưa chúng gần hơn với độ nhạy của đầu ngón tay người. Cảm biến này, được báo cáo trên tạp chí Nature Materials, dựa trên một hợp chất gồm các tấm graphene, các giọt kim loại lỏng có thể biến dạng và các hạt niken được nhúng trong silicone, được tạo hình thành những kim tự tháp nhỏ lấy cảm hứng từ cấu trúc vi mô của da người. Các cấu trúc kim tự tháp này tập trung ứng suất tại đầu mút, cho phép phát hiện các lực cực nhỏ trong phạm vi rộng, bao gồm khả năng cảm nhận cường độ áp suất, hướng lực, lực cắt, trượt và độ nhám bề mặt với độ phân giải không gian tương đương với các cơ quan cảm nhận cơ học của con người.
Thiết kế của cảm biến vượt qua những hạn chế của các cảm biến xúc giác hiện có, vốn thường cồng kềnh, dễ vỡ hoặc không thể phân biệt được các hướng lực khác nhau. Bằng cách đo tín hiệu từ bốn điện cực dưới mỗi kim tự tháp, thiết bị tái tạo các vectơ lực ba chiều đầy đủ theo thời gian thực. Khi tích hợp vào các bộ kẹp robot, nó cho phép thao tác tinh tế các vật thể dễ vỡ mà không cần biết trước tính chất của chúng, đồng thời thích ứng linh hoạt thông qua việc phát hiện trượt.
Thẻ
robotgraphenetactile-sensorflexible-materialsrobotic-manipulationforce-detectionsensor-technology