Hệ thống mới tăng khả năng phục hồi sau ngã của người máy lên 81% trên địa hình không bằng phẳng
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 19/2/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
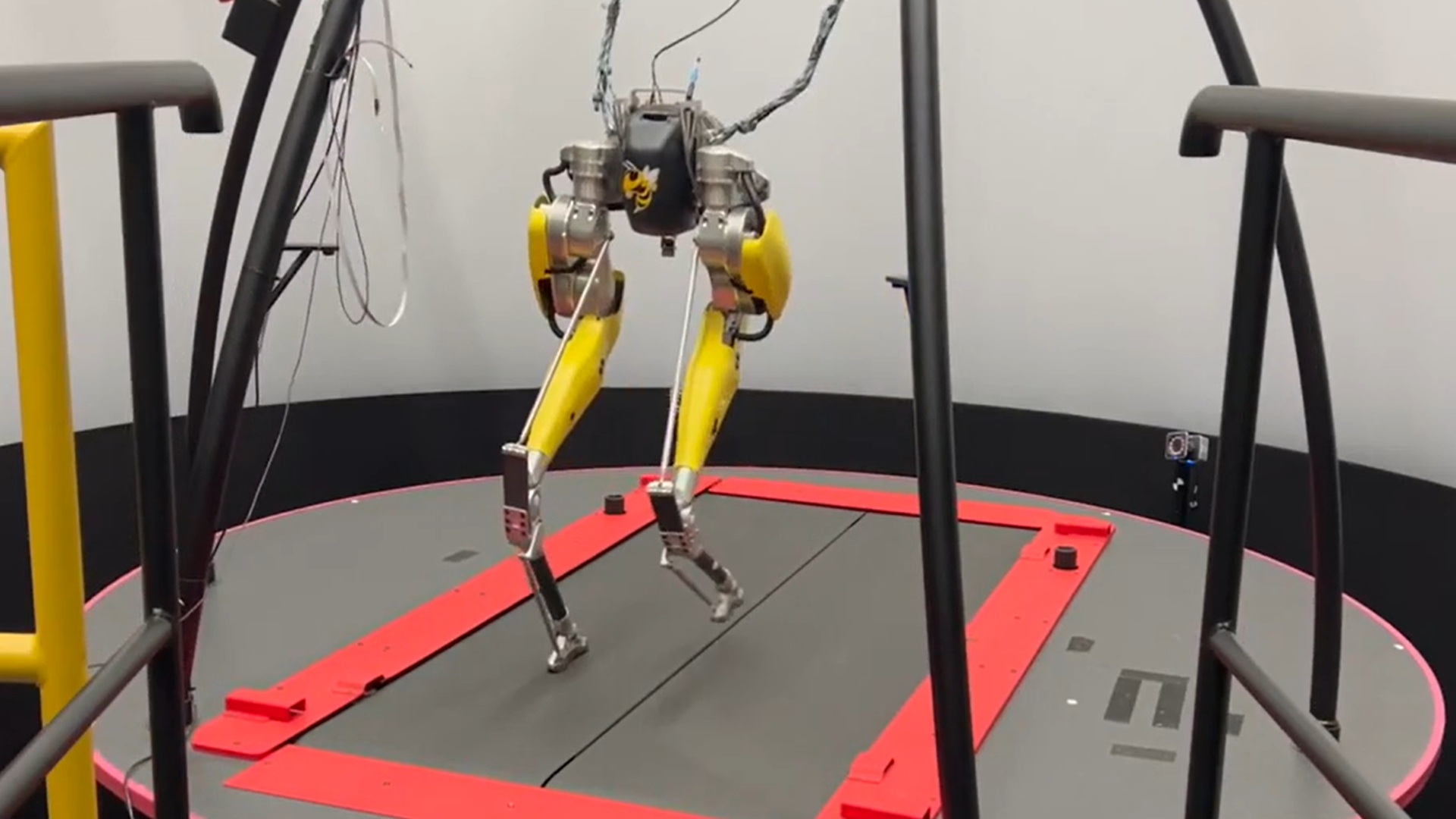
Đọc bài viết gốcCác nhà nghiên cứu tại Georgia Tech đã phát triển một khung lập kế hoạch và điều khiển thời gian thực, giúp cải thiện đáng kể khả năng phục hồi của robot hình người khi gặp phải các tác động đột ngột trong quá trình đi bộ trên địa hình không bằng phẳng hoặc chuyển động. Khác với các phương pháp trước đây dựa trên các mẫu chuyển động cố định, hệ thống này cho phép robot hai chân liên tục đánh giá sự ổn định và cập nhật bước đi tiếp theo trong thời gian thực để ngăn ngừa ngã. Được triển khai trên robot Cassie và thử nghiệm bằng máy chạy bộ lập trình được cùng các cú va chạm vật lý, khung này đã nâng cao khả năng phục hồi của Cassie lên 81%, cho phép ra quyết định nhanh hơn, tránh va chạm tốt hơn và bước đi tự tin hơn trên các bề mặt động.
Nghiên cứu giải quyết một thách thức quan trọng trong lĩnh vực robot: phục hồi sau những thay đổi hướng đi bất ngờ, chẳng hạn như đứng trên phương tiện di chuyển hoặc gặp chướng ngại vật giữa chừng. Dẫn đầu bởi Ye Zhao và nghiên cứu sinh tiến sĩ Zhaoyuan Gu, nhóm đã kết hợp các quy tắc logic chính thức với điều khiển dự đoán mô hình để tạo ra một hệ thống ra quyết định có cấu trúc, giúp robot phản ứng đáng tin cậy dưới áp lực. Mặc dù hệ thống đã cho thấy kết quả ấn tượng, vẫn còn những hạn chế, đặc biệt khi đi bộ xuống dốc hoặc thực hiện các động tác phức tạp.
Thẻ
roboticshumanoid-robotsbipedal-robotsrobot-fall-recoveryreal-time-controlautonomous-robotsrobot-stability