Hệ thống mới đơn giản hóa việc điều khiển robot linh hoạt, nâng cao độ chính xác
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 31/3/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
Đọc bài viết gốcCác nhà nghiên cứu tại Viện Công nghệ Ấn Độ Gandhinagar đã phát triển một phương pháp điều khiển mới cho robot continuum điều khiển bằng gân (TDCRs), là những robot mềm, linh hoạt có khả năng uốn cong và xoắn như các cấu trúc sinh học. Những robot này rất hữu ích khi hoạt động trong không gian chật hẹp như bên trong cơ thể người nhưng lại khó điều khiển do có gần như vô hạn bậc tự do và sự tương tác phức tạp giữa nhiều đoạn. Các phương pháp điều khiển truyền thống đòi hỏi tính toán nặng và gặp khó khăn khi vận hành theo thời gian thực. Cách tiếp cận mới giới thiệu một khung làm việc gọi là không gian kích hoạt ảo (VAS), giúp đơn giản hóa việc điều khiển chuyển động của robot bằng cách biểu diễn các chuyển động chỉ với hai tham số—hướng và độ lớn—cho phép điều khiển độc lập từng đoạn của robot và giảm thiểu sự can thiệp giữa các đoạn.
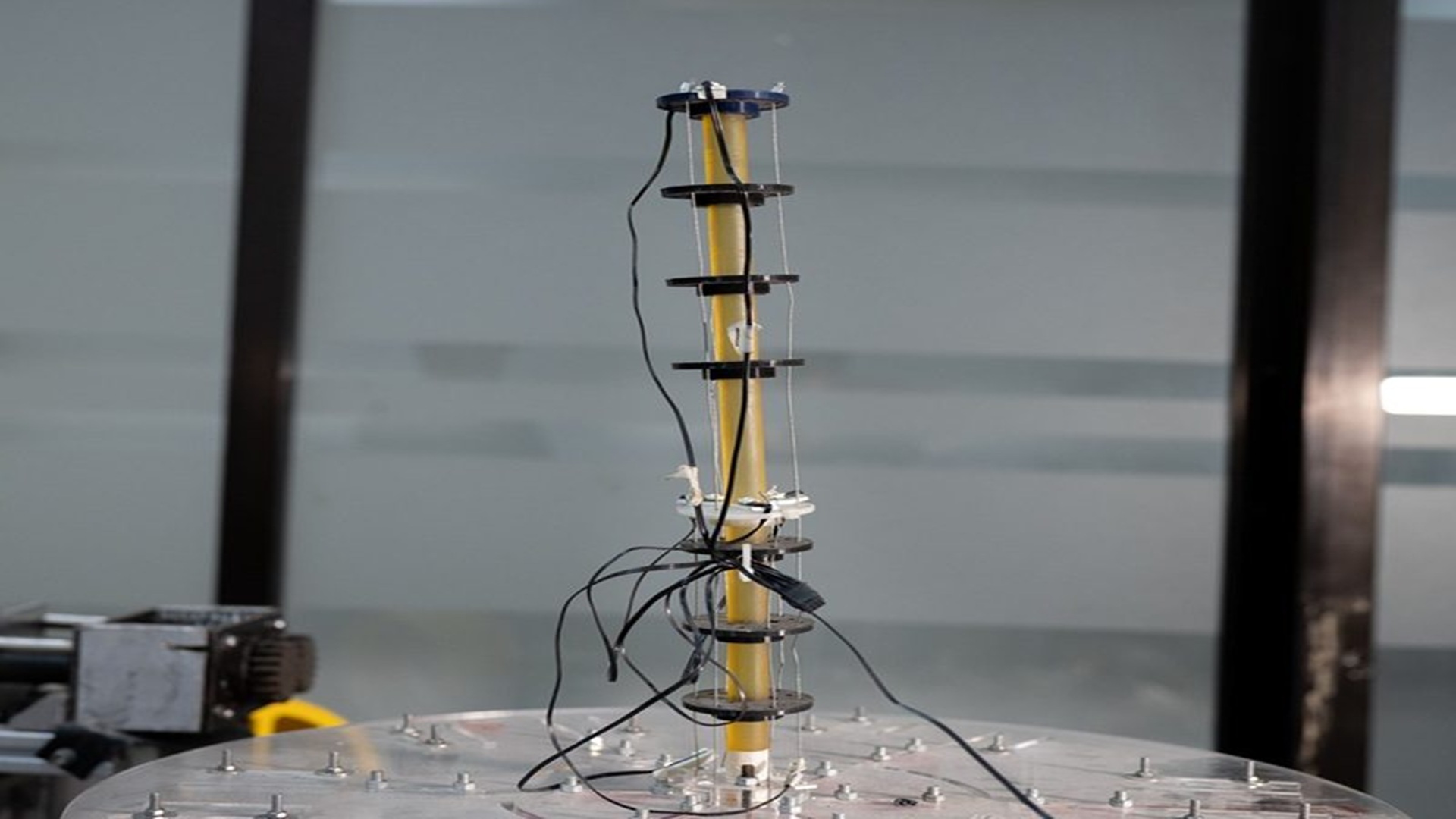
Để xác thực phương pháp của mình, các nhà nghiên cứu đã xây dựng một cánh tay robot gồm hai đoạn được điều khiển bởi sáu động cơ và theo dõi chuyển động của nó bằng hệ thống ghi hình chuyển động với các điểm đánh dấu LED. Hệ thống đã thể hiện độ chính xác cao, đạt sai số dưới một phần trăm khi thực hiện các nhiệm vụ như chạm tới các điểm mục tiêu và theo dõi các đường đi phức tạp như hình ngũ giác và xoắn ốc.
Thẻ
roboticsflexible-robotstendon-driven-continuum-robotsrobot-control-systemssurgical-robotsprecision-roboticsrobotic-motion-control