Vật liệu lập trình tạo ra ngón tay đa ổn định không động cơ cho robot học
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 29/10/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
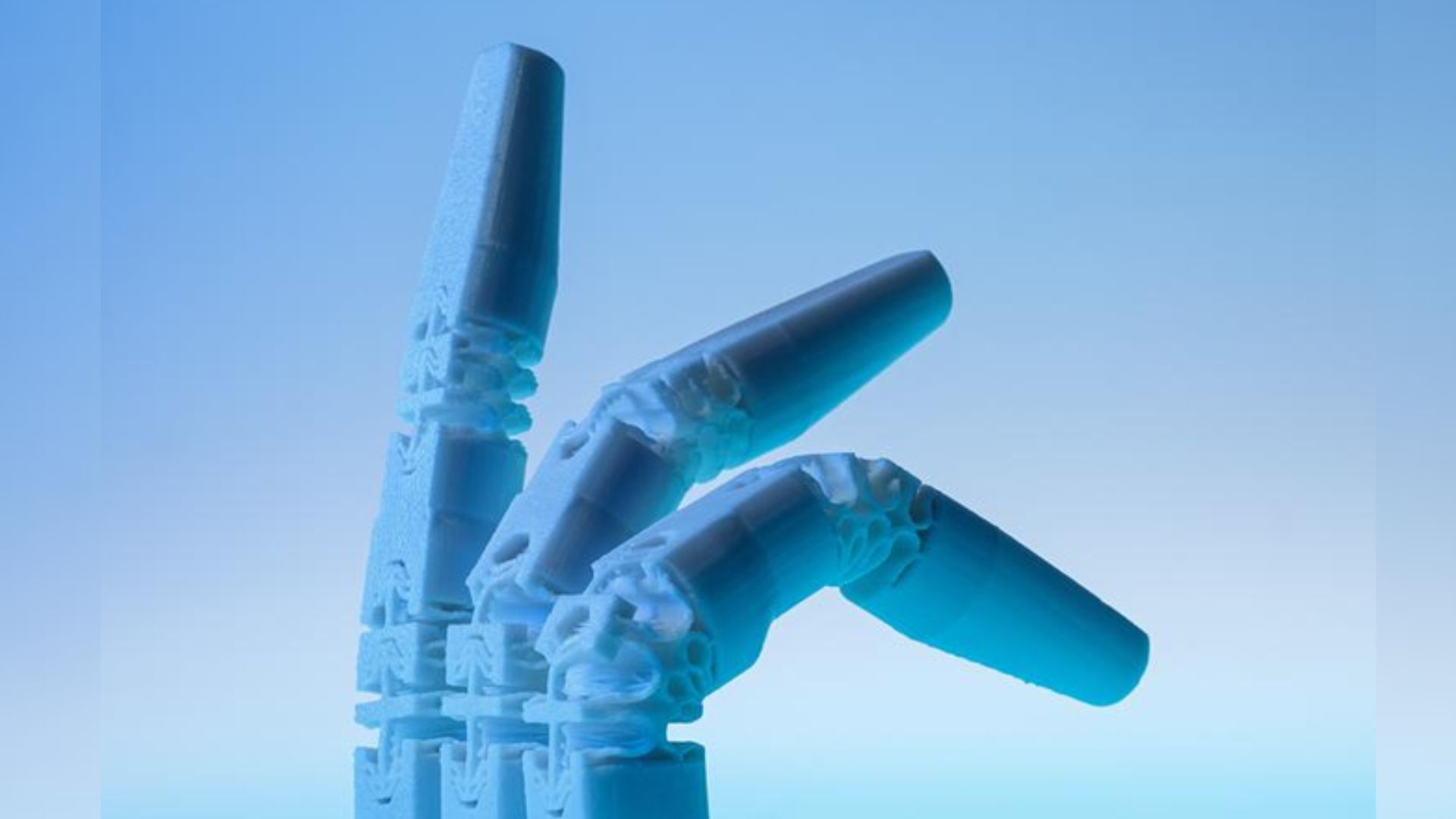
Đọc bài viết gốcCác nhà nghiên cứu tại Cụm xuất sắc Fraunhofer về Vật liệu lập trình (CPM) đã phát triển một khớp ngón tay mới làm từ một mảnh vật liệu biến đổi lập trình duy nhất, gọi là dự án ProFi (Ngón tay đa ổn định lập trình được). Ngón tay không có động cơ này có thể khóa ở bốn vị trí ổn định mà không cần ốc vít, bản lề hay nhiều bộ phận liên kết phức tạp, giúp đơn giản hóa thiết kế của tay giả và kẹp robot. Ngón tay uốn cong theo một trục với các bước 30 độ, cho phép các vị trí cầm nắm, nghỉ ngơi hoặc ra hiệu riêng biệt. Thiết kế đã được xác thực thông qua các mô phỏng phương pháp phần tử hữu hạn để đảm bảo độ bền và độ cứng, và được sản xuất bằng các kỹ thuật chế tạo gia tăng như Mô hình hóa Lắng đọng Nhiệt chảy (FDM) và Nung chảy Laser chọn lọc (SLS), cho phép tùy chỉnh dễ dàng và chế tạo không cần lắp ráp.
Đột phá chính nằm ở việc tích hợp các tế bào đơn ổn định kép — các dầm đàn hồi có thể bật giữa các trạng thái ổn định mà không cần lực liên tục — bên trong cấu trúc khớp. Sử dụng phần mềm chuyên dụng (ProgMatCode), các nhà nghiên cứu đã tối ưu hóa các tế bào này để tạo ra cơ chế đa ổn định thụ động.
Thẻ
programmable-materialsroboticsprostheticsmetamaterials3D-printingmultistable-structuresadditive-manufacturing