Bàn tay robot có thể tháo rời và đảo ngược định nghĩa lại sự khéo léo - Robohub
Nguồn: robohub
Ngày đăng: 19/2/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
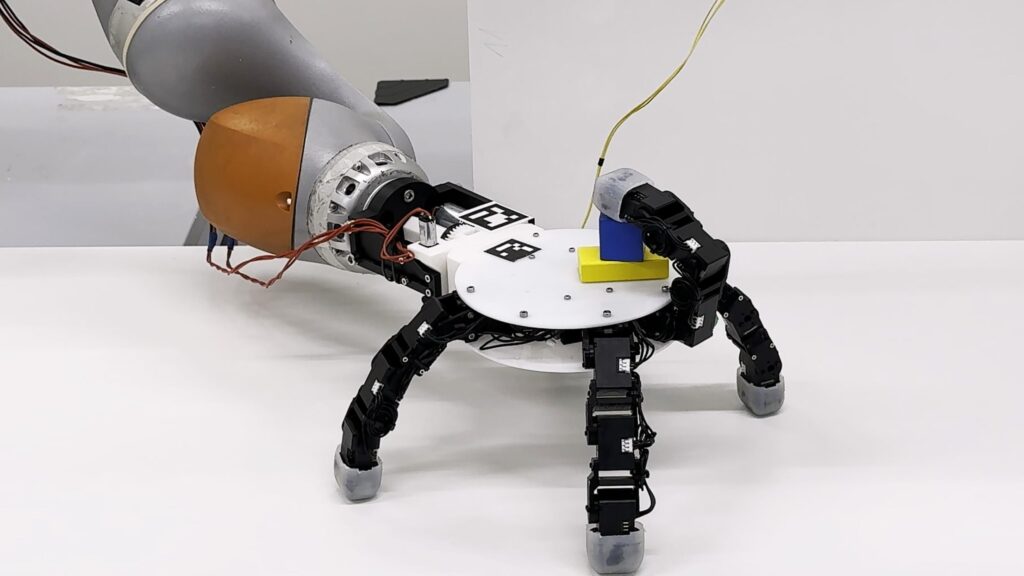
Đọc bài viết gốcMột nhóm các nhà nghiên cứu tại EPFL, do Aude Billard dẫn đầu, đã phát triển một bàn tay robot mới định nghĩa lại sự khéo léo bằng cách vượt qua những hạn chế chính của bàn tay con người. Khác với ngón cái bất đối xứng của con người và khả năng vận động hạn chế của cánh tay, bàn tay robot này có thiết kế đảo ngược với tối đa sáu ngón tay giống hệt nhau đầu silicone, có thể tạo thành các cặp đối diện giống như ngón cái kẹp. Lòng bàn tay và mặt sau có thể hoán đổi cho nhau, và nó có thể tách rời khỏi cánh tay robot để bò như con nhện, cho phép nó nắm và mang các vật thể vượt ra ngoài tầm với của cánh tay. Khả năng này, gọi là “điều khiển di động,” kết hợp giữa thao tác cố định và di chuyển tự chủ, mang lại những ứng dụng đầy hứa hẹn trong robot công nghiệp, dịch vụ và thám hiểm.
Lấy cảm hứng từ các chi đa năng trong thiên nhiên, như của bạch tuộc và bọ ngựa, bàn tay robot có thể giữ nhiều vật cùng lúc trên lòng bàn tay, mặt sau hoặc cả hai. Với năm ngón tay, nó tái hiện hầu hết các kiểu nắm truyền thống của con người, và với nhiều ngón hơn, nó có thể thực hiện các nhiệm vụ phức tạp thường đòi hỏi hai bàn tay, như
Thẻ
roboticsrobotic-handdexterityautonomous-mobilityloco-manipulationsilicone-tipped-fingersrobotic-design