Robot sẽ điều hướng các đường mòn đi bộ - Robohub
Nguồn: robohub
Ngày đăng: 12/1/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
Đọc bài viết gốcBài viết thảo luận về việc phát triển các robot tự hành có khả năng điều hướng trên các đường mòn đi bộ, một nhiệm vụ đầy thách thức do điều kiện địa hình không thể đoán trước và đa dạng như cây đổ, mặt đất không bằng phẳng, xói mòn và những thay đổi môi trường sau bão. Động lực đằng sau nghiên cứu này là các ứng dụng thực tiễn tiềm năng của những robot này, bao gồm giám sát và bảo trì đường mòn, thu thập dữ liệu môi trường, hoạt động tìm kiếm và cứu hộ, cũng như hỗ trợ nhân viên công viên ở những khu vực xa xôi hoặc nguy hiểm. Độ phức tạp tăng lên khi robot phải quyết định liệu có nên ở lại trên đường mòn để tránh gây hại cho môi trường hay tạm thời rời khỏi đường mòn vì lý do an toàn.
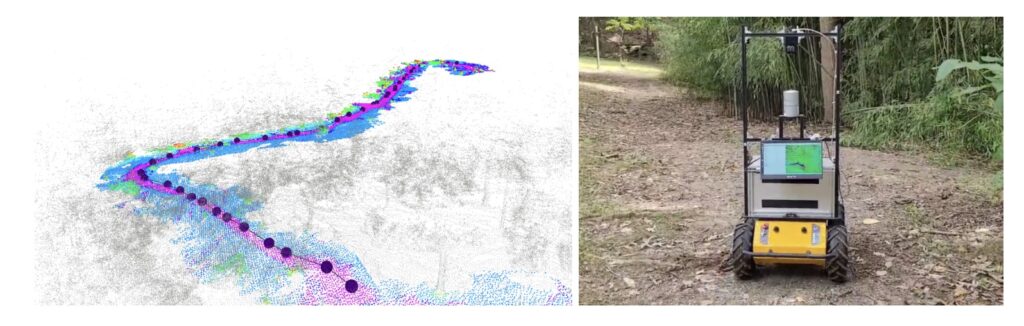
Đổi mới chính được trình bày là hệ thống nhận thức kép kết hợp phân tích địa hình hình học qua LiDAR và phát hiện địa hình ngữ nghĩa thông qua hình ảnh camera. LiDAR cung cấp thông tin về độ dốc và các chướng ngại vật lớn, trong khi phân đoạn ngữ nghĩa xác định các loại địa hình cụ thể như đường mòn, cỏ, đá và rễ cây. Bằng cách kết hợp các nguồn dữ liệu này thành một bản đồ khả năng đi lại duy nhất, robot có thể đánh giá tốt hơn các lối đi an toàn. Các nhà nghiên cứu đã tạo ra một bộ dữ liệu hình ảnh đường mòn đi bộ được gán nhãn và huấn luyện một mô hình để nhận diện hiệu quả địa hình đường mòn. Điều hướng
Thẻ
roboticsautonomous-navigationhiking-trailsLiDARsemantic-segmentationterrain-analysissearch-and-rescue