Robot mềm hiện có thể được in 3D để di chuyển chính xác theo thiết kế.
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 6/2/2026
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
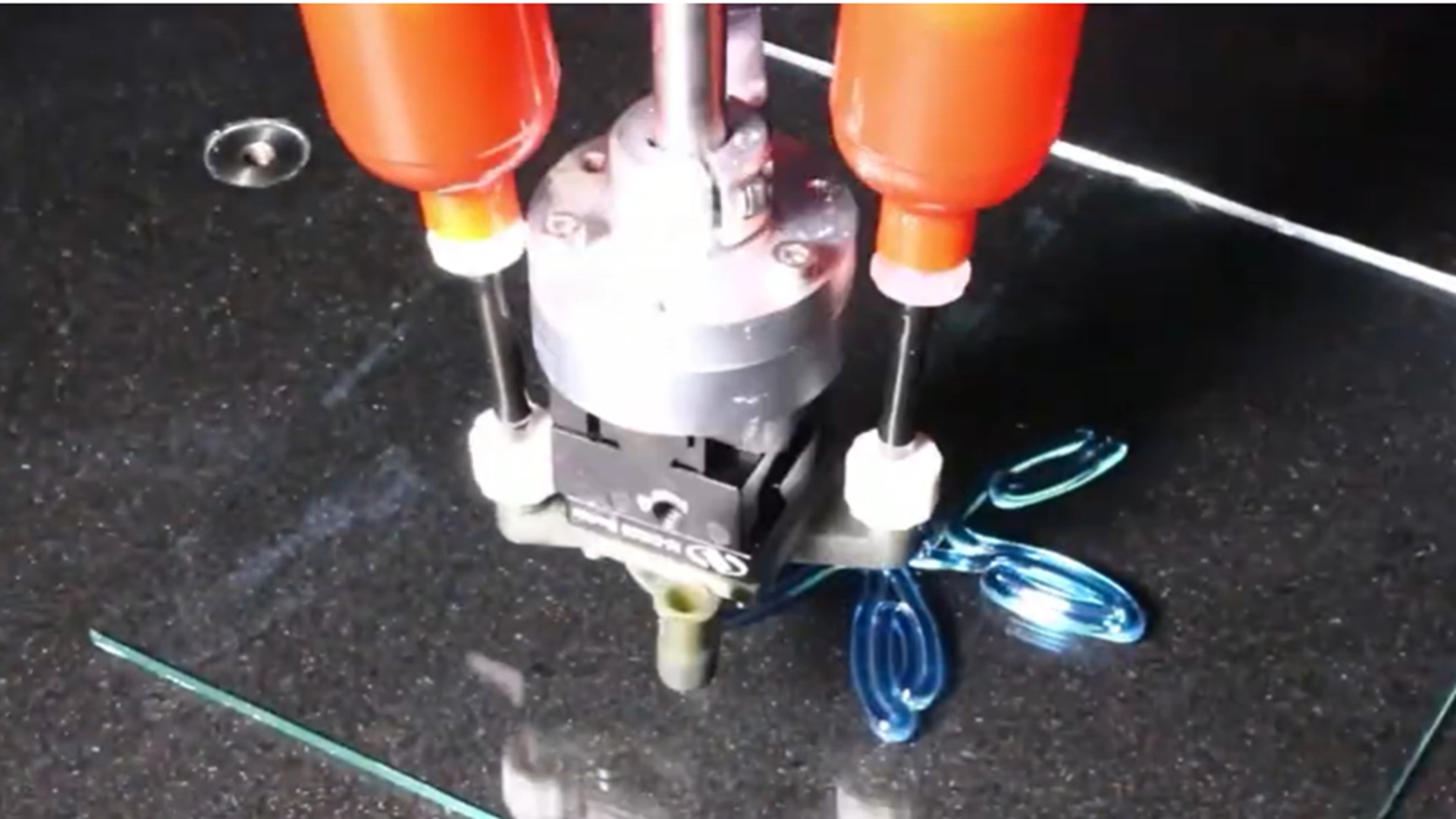
Đọc bài viết gốcCác kỹ sư tại Harvard đã phát triển một kỹ thuật in 3D sáng tạo cho phép các robot mềm có thể uốn cong, xoắn và thay đổi hình dạng theo những cách được lập trình chính xác khi bơm phồng. Phương pháp này tích hợp hành vi biến đổi hình dạng trực tiếp vào cấu trúc in bằng cách tạo ra các sợi linh hoạt với các kênh rỗng bên trong đóng vai trò như các đường dẫn khí nén. Khác với phương pháp chế tạo robot mềm truyền thống—dựa vào khuôn đúc, đúc lớp và lắp ráp phức tạp—cách tiếp cận này sử dụng kỹ thuật in 3D đa vật liệu quay với một đầu phun duy nhất có thể đồng thời đổ nhiều vật liệu. Bằng cách kiểm soát sự quay của đầu phun, tốc độ dòng chảy và hình học, các nhà nghiên cứu có thể định vị và tạo hình chính xác các kênh bên trong, khi được bơm áp suất sẽ tạo ra chuyển động dự đoán được như uốn cong hoặc xoắn.
Nhóm nghiên cứu đã chứng minh kỹ thuật này bằng cách in một bộ truyền động hình hoa có thể mở ra và cuộn lại, cùng một bộ kẹp hình bàn tay với các khớp nối linh hoạt, tất cả trong một lần in liên tục. Các cấu trúc in sử dụng lớp vỏ ngoài bằng polyurethane bền chắc và lõi bên trong dạng gel có thể tháo rời, được rửa sạch để tạo thành các kênh rỗng. Quá trình này loại bỏ nhu cầu sử dụng khuôn đúc và các bước phức tạp.
Thẻ
soft-robotics3D-printingsoft-robotsmaterials-sciencepneumatic-actuatorsbio-inspired-robotsflexible-materials