Dạy robot lập bản đồ môi trường rộng lớn - Robohub
Nguồn: robohub
Ngày đăng: 5/11/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
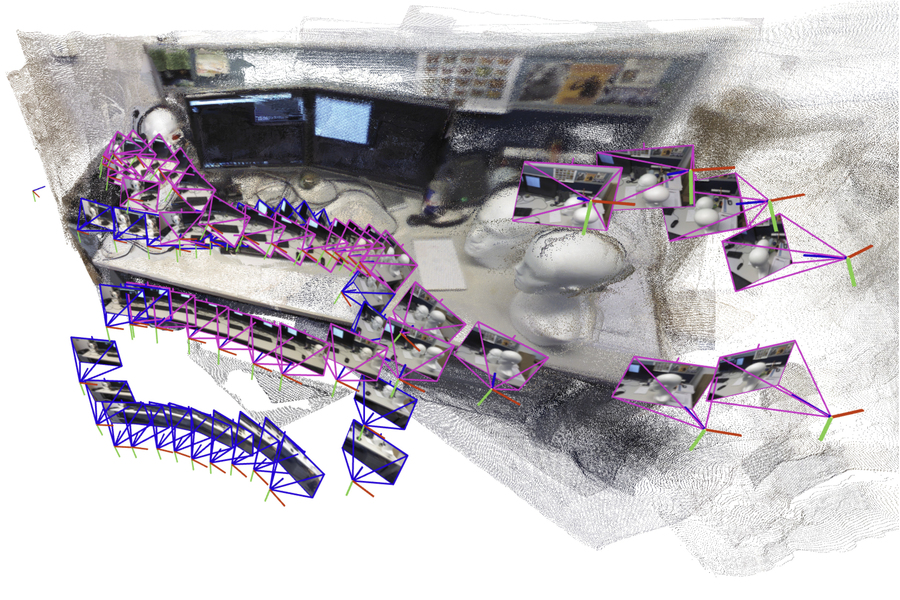
Đọc bài viết gốcBài báo thảo luận về một hệ thống mới dựa trên trí tuệ nhân tạo do các nhà nghiên cứu tại MIT phát triển, nhằm giúp robot có thể lập bản đồ các môi trường lớn và phức tạp một cách hiệu quả trong thời gian thực. Các mô hình học máy truyền thống cho việc định vị và lập bản đồ đồng thời (SLAM) bị giới hạn bởi khả năng chỉ xử lý một số lượng nhỏ hình ảnh cùng lúc, điều này hạn chế tính hữu dụng trong các tình huống đòi hỏi thời gian như nhiệm vụ tìm kiếm và cứu hộ. Để giải quyết vấn đề này, nhóm MIT đã tạo ra một phương pháp dần dần tạo ra các bản đồ con nhỏ hơn từ hình ảnh camera trên tàu và sau đó ghép các bản đồ con này lại với nhau để hình thành một bản tái tạo 3D hoàn chỉnh của môi trường. Cách tiếp cận này cho phép hệ thống xử lý hàng nghìn hình ảnh nhanh chóng và đồng thời ước lượng vị trí của robot, mà không cần đến camera đã được hiệu chuẩn hay điều chỉnh chuyên sâu.
Sự đơn giản, tốc độ và độ chính xác của hệ thống khiến nó phù hợp với các ứng dụng thực tế ngoài việc ứng phó thảm họa, bao gồm các thiết bị thực tế mở rộng và robot công nghiệp. Bằng cách cho phép lập bản đồ 3D nhanh chóng và có thể mở rộng, công nghệ này giúp robot điều hướng trong các không gian phức tạp hiệu quả hơn đồng thời duy trì sự dễ dàng trong việc triển khai. Nghiên cứu này do sinh viên cao học dẫn dắt
Thẻ
roboticsartificial-intelligence3D-mappingSLAMmachine-learningsearch-and-rescue-robotsautonomous-navigation