Mỹ: Chó robot cân bằng tải trọng lăn trên lưng bằng công nghệ cảm biến xúc giác
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 25/11/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
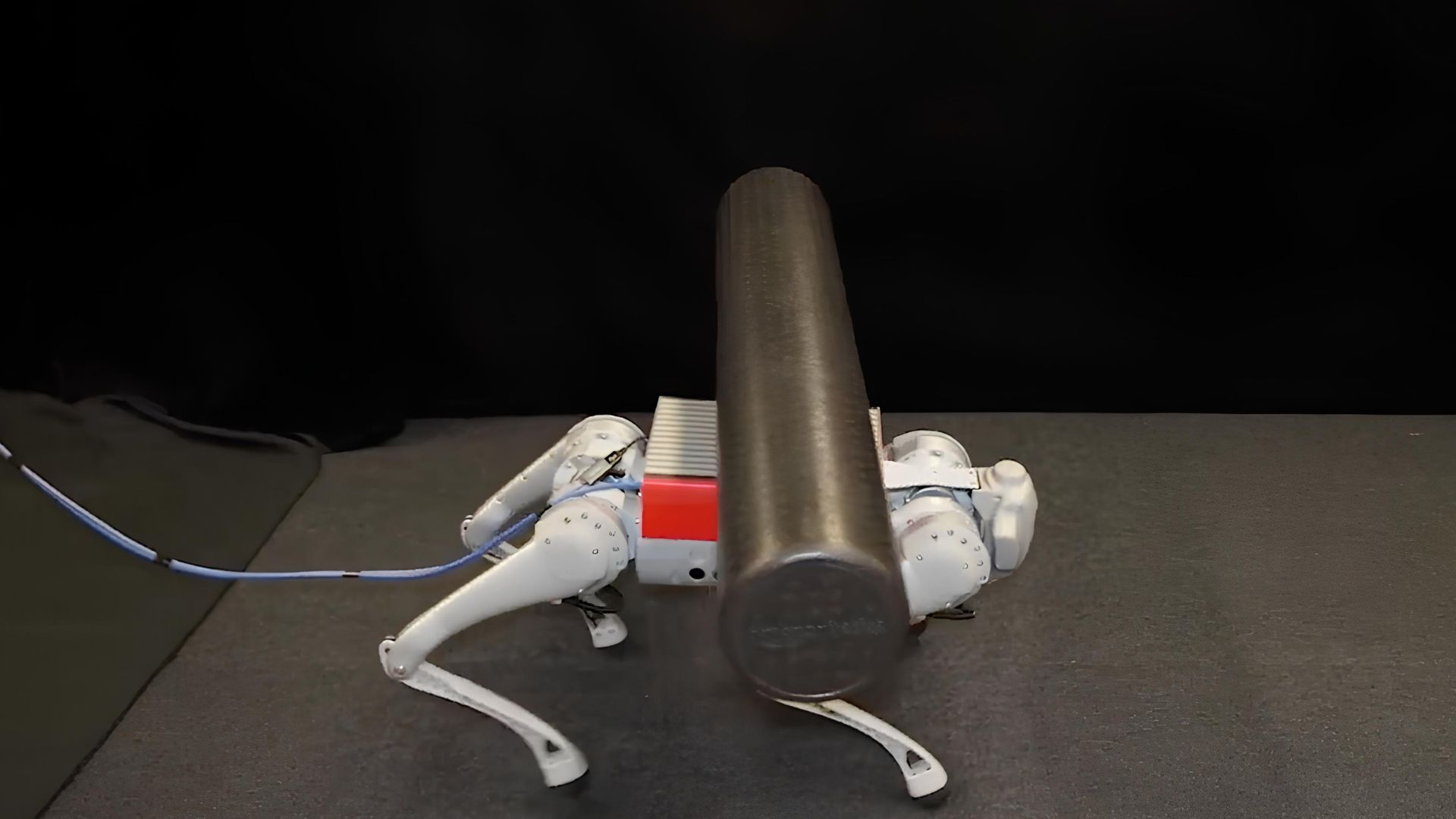
Đọc bài viết gốcCác nhà nghiên cứu tại Đại học Carnegie Mellon đã phát triển LocoTouch, một hệ thống cảm biến xúc giác mới cho phép robot bốn chân mang các vật thể hình trụ và hình dạng không đều, lỏng lẻo, không được cố định trên lưng mà không bị lăn rơi trong quá trình di chuyển. Khác với các robot truyền thống dựa vào các thùng chứa cứng hoặc hộp gắn để cố định hàng hóa, LocoTouch sử dụng một mảng cảm biến xúc giác mật độ cao làm từ màng piezoresistive và điện cực dẫn điện trải phẳng trên lưng robot. Cảm biến này liên tục phát hiện sự dịch chuyển về vị trí và hướng của tải trọng, cho phép robot điều chỉnh tư thế và dáng đi theo thời gian thực để duy trì thăng bằng, tương tự như cách con người bản năng ổn định vật thể khi đi bộ.
Hệ thống được huấn luyện thông qua học tăng cường sử dụng hơn 4.000 bản sao kỹ thuật số trong mô phỏng, giúp robot trải nghiệm nhiều chuyển động và tác động khác nhau của vật thể. Kỹ năng giữ thăng bằng học được đã được chuyển trực tiếp sang robot bốn chân Unitree Go1 vật lý, thành công trong việc mang nhiều vật thể khác nhau trên quãng đường 60 mét, vượt chướng ngại vật và duy trì ổn định ngay cả khi bị va chạm. Đây là một bước tiến quan trọng trong...
Thẻ
robottactile-sensingquadrupedal-robotsreinforcement-learningrobotic-balancepiezoresistive-sensorsrobotic-assistants